SU(2)群的不可约表示
SU(2)群的表示
SO(3) 本身就是 SU(2) 群的一个三维不可约表示。接下来我们研究 SU(2) 群的所有不等价不可约表示。
为了得到表示,我们可以先构造一组基,然后用 SU(2) 群元作用在这组基上,就可以得到一个表示矩阵。令变量 u=(u1u2),我们可以把 u 看作是二维复空间中的一个坐标点,则算符 Γg 作用在 u 的标量函数 f(u) 有:
Γgf(u)=f(g−1u)
其中括号内部分为
g(a,b)−1u=(a−b∗ba∗)−1(u1u2)=(a∗b∗−ba)(u1u2)=(a∗u1−bu2b∗u1+au2)
构造函数:取如下 2l+1(l 为整数或半奇数)个齐次单项式函数
fm(l)(u1,u2)=(l+m)!(l−m)!u1l+mu2l−m(m=l,l−1,⋯,−l)
也就是在给定 l 的基础下,m 从 l 变化到 −l,2l+1 个 m 构成了一组基。但并非所有的基函数都能荷载 SU(2) 群的表示,一组函数作为基的条件:任意群元对基变换后得到的新函数还能够表示为基函数的线性组合。
经过计算,上述函数确实满足基函数的条件
Γg(a,b)fm(l)(u)=m′=−l∑lfm′(l)(u)Dm′ml(g(a,b))
并得到组合系数,也就是 SU(2) 群元 g(a,b) 在这组基下的不可约表示为:
Dm′ml(a,b)≡Dm′ml(g(a,b))=k=0∑l+mk!(l+m−k)!(l−m′−k)!(m′−m+k)!(−1)k(l+m)!(l−m)!(l+m′)!(l−m′)!al−m′−k(a∗)l+m−kbk(b∗)m′−m+k
其中上标 l 是表示的指标,下标 m,m′ 是矩阵的行列指标。
l=1 时为恒等表示,D0(a,b)≡1
l=21 时,D21(a,b)=(a∗−bb∗a)=g(a,b)∗ (矩阵指标顺序:m=21,−21)
l=1 时,D1(a,b)=a∗2−2a∗bb22a∗b∗aa∗−bb∗−2abb∗22ab∗a2 (矩阵指标顺序:m=1,0,−1)
当 l=21 时,表示矩阵 D21(a,b) 恰好是 SU(2) 群元 g(a,b) 的复共轭,又因为表示的复共轭依然是表示,为了让 l=21 时 SU(2) 的表示就是群元本身,需对上述表示取复共轭。若定义 D(l)(a,b)=[Dl(a,b)]∗,此时便有 D(21)(a,b)=g(a,b)。
SU(2)表示的幺正性
m=−l∑lfm(l)(u1,u2)2=m=−l∑l(l+m)!(l−m)!u1l+mu2l−m2=(2l)!1k=0∑2lk!(2l−k)!(2l)!=(2l)!(u12+u22)2l
根据上式可以证明 DlDl+=I2l+1,所以 D(l)(a,b) 是幺正表示。
SU(2)表示的不可约性
现在我们确定表示 Dm′m(l)(a,b) 的不可约性
D(21)(a,b)=a−b∗ba∗=g(a,b)D(1)(a,b)=a2−2ab∗b∗22abaa∗−bb∗−2a∗b∗b22a∗ba∗2
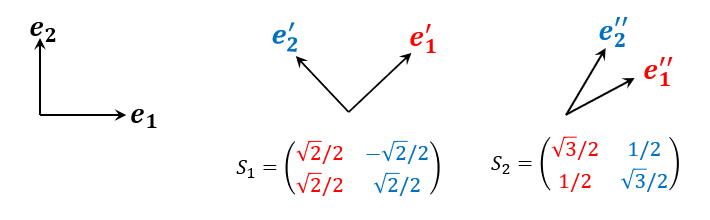
我们知道,互为共轭的两个表示是等价的,那么就存在一个相似变换矩阵 S,若令 Smm′l=(−1)mδm,−m′,并取 (−1)21=i,则有
(Sl)−1=Sl,SlDlSl=D(l)=(Dl)∗
写出前几个 Sl 矩阵,都是次对角线上不为零:
S21=0−ii0S1=00−1010−100S23=000i00−i00i00−i000S2=1S11
为了保证 l=21 时的表示等于 g(a,b) 这种形式上的统一,下面的讨论皆以 D(l)(a,b) 为准。
当 a=exp(−i2α),b=0 时,仅当 k=0,m′−m+k=0 时有非零矩阵元,表示矩阵只有对角元
Dm′m(l)(e−i2α,0)=δm′me−imα
当 b 不再等于零时,我们只能求出第一行 m′=l 的元素,为了 l−m′−k≥0,此时只能有 k=0,计算得到表示矩阵第一行的表达式为
Dlm(l)(a,b)=(l+m)!(l−m)!(2l)!al+mbl−m
根据这两种特殊的表示矩阵形式,我们接下来就可以证明表示矩阵的不可约性,根据舒尔定理,若只有单位矩阵常数倍与所有表示矩阵对易,则表示矩阵为不可约表示。
假设存在矩阵 A 与所有表示矩阵 D(l)(a,b) 对易,那么必然与矩阵之一 D(l)(e−i2α,0) 对易,根据对易关系得到
Anm(e−imα−e−inα)=0
所以当 n=m 时,Anm=0,说明矩阵 Anm=anδnm 是对角矩阵。
接下来当 b=0 时,矩阵 A 还必须与 D(l)(a,b) 对易,根据对易关系可得
Dm′m(l)(am′−am)=0
取 m′=l 则有 Dlm(l)(al−am)=0,由于 l 取确定值,根据前面求出的表示矩阵第一行的表达式可知,Dlm(l)(a,b)=0,所以 al=am 对任意 m 都成立,说明 A 的所有对角元都相等,因此矩阵 A 必然是单位矩阵的常数倍 A=alI2l+1。
根据舒尔引理推论二,除单位矩阵常数倍外不存在与所有表示矩阵对易的矩阵,那么该表示是不可约的。
SU(2)类的结构及特征标
我们已经证明了 D(l)(a,b) 是 SU(2) 群的不可约幺正表示,接下来我们研究 SU(2) 群的类结构及特征标。
求 g(a,b)=(a−b∗ba∗) 的本征值可得
λ±=2a+a∗±21(a+a∗)2−4=Re(a)±i1−Re(a)2
本征值只和 a 的实部有关,而与 b 无关,所有 Re(a) 相同的群元具有相同的本征值。又幺正矩阵必可通过幺正相似变换对角化,即存在 g′∈SU(2) 使得
g′−1g(a,b)g′=(λ−00λ+)∈SU(2)
说明 g(a,b) 和其本征值组成的对角矩阵属于同一个类,因此所有 Re(a) 相同的群元属于同一类。
那么不妨设 Re(a)=cos2α,则 λ±=e±i2α,代入上式
g′−1g(a,b)g′=(e−i2α00ei2α)=g(e−i2α,0)
而这样的群元表示矩阵恰好就是我们刚刚证明的 b=0 时的对角矩阵。而同一类群元具有相同的特征标
χ(l)(a,b)=χ(l)(e−i2α,0)=TrD(l)(e−i2α,0)=m=−l∑le−imα=1−e−iαeilα(1−e−i(2l+1)α)=sin[(l+21)α]/sin(2α)
SU(2)表示的完备性
我们还想知道 D(l)(a,b) 是否构成了 SU(2) 群的所有不等价不可约表示。
根据
χ(l+1)−χ(l)=sin(α/2)sin[(l+3/2)α]−sin[(l+1/2)α]=2cos[(l+1)α]
那么有
χ(0)=1,χ(21)=2cos2α,χ(1)−χ(0)=2cosα,χ(23)−χ(21)=2cos23α,⋯
上述结果 {1,cos2α,cosα,cos23α,cos2α,⋯} 构成了 α∈[−2π,2π] 上偶函数的完备基,也就是说该区间的任意偶函数都能写为这些结果的线性组合。若存在一个与所有 D(l) 不等价的不可约表示 D′,设其特征标为 f(α),因为 g(e−i2α,0) 和 g(ei2α,0) 属于同一类,所以 f(α) 必为偶函数。由紧致李群的不变积分和特征标的正交性
∫−2π2πχ(l)(α)∗f(α)ρ(α)dα=0⇒∫−2π2πcoslαf(α)ρ(α)dα=0(l=0,21,1,⋯)
上式中 coslα 由完备基线性表示,由于每一项都为零,所以得到第二个积分式。因李群是解析的,g(α) 邻域内群元一一映射到其逆元 g(α)−1=g(−α) 的邻域内,因而在群空间中的密度一样,ρ(g)=ρ(g−1)⇒ρ(α)=ρ(−α)。
既然权函数也是偶函数,那么偶函数 f(α)ρ(α) 与完备基正交,所以该偶函数只能是零函数,又因为 ρ(α)=0,所以 f(α)=0,说明不存在与所有 D(l) 不等价的不可约表示 D′。
D(l)(l=0,1/2,1,⋯) 就是 SU(2) 群的所有不等价不可约幺正表示。
由表示的公式我们可以发现
D(l)(−g)=(−1)2lD(l)(g)
⎩⎨⎧l 为整数时 D(l)(−g)=D(l)(g),二对一同态,非忠实表示l 为半奇数时 D(l)(−g)=−D(l)(g), 一对一同构,忠实表示
若以欧拉角作为 SU(2) 群的参数,则 D(l) 表示成为
g(α,β,γ)=e−i2α+γcos2βei2α−γsin2β−e−i2α−γsin2βei2α+γcos2β=g(a=e−i2α+γcos2β,b=−e−i2α−γsin2β)
此时表示的公式变为
Dm′m(l)(α,β,γ)≡Dm′m(l)(e−i2α+γcos2β,−e−i2α−γsin2β)=k=0∑l+m(−1)m′−m+kk!(l+m−k)!(l−m′−k)!(m′−m+k)!(l+m)!(l−m)!(l+m′)!(l−m′)!×(cos2β)2l+m−m′−2k(sin2β)m′−m+2ke−im′αe−imγ
withα∈[0,4π]β∈[0,π]γ∈[0,2π]
在欧拉角参数下,SU(2) 群的不变积分测度为
16π2sinβ dαdβdγ
有了积分测度我们便可以计算表示 D(l) 的正交性关系
16π2∫04πdα∫0πsinβdβ∫02πdγDmn(l)(α,β,γ)Dm′n′(l′)(α,β,γ)=2l+11δll′δmm′δnn′
16π2∫04πdα∫0πsinβdβ∫02πdγχ(l)∗(α,β,γ)χ(l′)(α,β,γ)=2l+11δll′
l,l′=0,21,1,23,2,⋯
SO(3)群的不可约表示及双群
SO(3)群的表示
SO(3) 可以看作是 SU(2) 的一个三维表示,而 D(1)(a,b) 也是一个三维表示,我们已经证明了 D(l)(a,b) 是 SU(2) 群的所有不等价不可约幺正表示,这就意味着:SO(3) 转动矩阵和 D(1)(a,b) 是等价的。
已知 SU(2) 到 SO(3) 间存在二对一的同态
当 l 为整数时,R 和 D(l) 之间存在某种关系
当 l 为整数时 SO(3) 群元 R 通过 g∈SU(2) 与 D(l) 一一同构。若 g1g2=g3,
R(±g1)R(±g2)=R(±g3)D(l)(±g1)D(l)(±g2)=D(l)(±g3)
上面两式是对应的,于是当 l 为非零整数时 SO(3) 与 SU(2) 的表示 D(l) 同构,D(l) 同时也是 SO(3) 的不可约幺正表示,并且是忠实表示。
用与 SU(2) 类似的方法可以证明:
D(l)(l=0,1,2,⋯)是 SO(3) 的所有不等价不可约幺正表示。
SO(3) 中绕 n 轴转 ϕ 角的算符可用轨道角动量算符写为
R^n(ϕ)=exp(ϕn⋅X^)=exp(−ℏiϕn⋅L^)[L^i,L^2]=0⇒[R^n(ϕ),L^2]=0
又因为 L^2 的本征态为球谐函数 ∣lm⟩=Yml(θ,φ):L2∣lm⟩=l(l+1)ℏ2∣lm⟩,那么
L^2R^n∣lm⟩=R^nL^2∣lm⟩=R^nl(l+1)ℏ2∣lm⟩=l(l+1)ℏ2R^n∣lm⟩
说明 R^n∣lm⟩ 仍然是 L^2 的本征态,且本征值不变,但是我们已知 ∣lm⟩ 是全部的本征态,所以 R^n∣lm⟩ 必然可以表示为 ∣lm⟩ 的线性组合
R^n(ϕ)∣lm⟩=m′=−l∑l∣lm′⟩Dm′m(Rn(ϕ))
上式满足基函数的定义,可以证明,上式中的表示 D=D(l),于是 {∣lm⟩} 构成了 SO(3) 群的 2l+1 维不可约表示 D(l) 的一组基函数。
SO(3)群表示的特征标
D(l) 中所有 l 为整数(奇数维)的表示为 SO(3) 群的表示,特征标必然还是沿用 D(l) 的特征标,即
χ(l)(α)=sin2αsin(l+21)α
转角相同的旋转具有相同的特征标,因 R(n′,ω)=SR(n,ω)S−1,其中 S 是把 n 转动到 n′ 方向的旋转(不唯一),即 n′=Sn。
所以任意轴转动的特征标都可以表示为绕 z 轴转动相同角度的特征标
χ(l)(n,α)=χ(l)(z^,α)=χ(l)(α,0,0)
双群
我们说 SO(3) 群不可约表示只取 SU(2) 中 l 等于整数部分,但是当 l 为半奇数时,若仍把 D(l) 看作 SO(3) 群的表示矩阵,那么此时同样的转动矩阵 R 会对应 SU(2) 的两个不同表示矩阵
此时同一 SO(3) 群元 R(±g) 无法映射到单一表示矩阵,因而 SU(2) 的偶数维表示 D(l) 不是 SO(3) 的表示。但如果规定一个 R(g)∈SO(3) 可以对应 ±D(l)(g) 两个表示矩阵的话,那么此时 D(l) 可以看做 SO(3) 的一个特殊的表示,称之为双值表示。
双值表示不是原先意义下的表示!相应的,原先意义下的表示则可称为单值表示。
以欧拉角表示时,DSU(2)=2DSO(3),那么若将 SU(2) 的取值范围限定在 Dso(3) 内,这样就有一一对应了,那么这种情况下的 D(l) 可以作为 SO(3) 的表示矩阵吗?
答案是否定的,因为这样是不封闭的,例如
R(43π,0,0)R(43π,0,0)=R(−2π,0,0)D(l)(43π,0,0)D(l)(43π,0,0)=D(l)(23π,0,0)
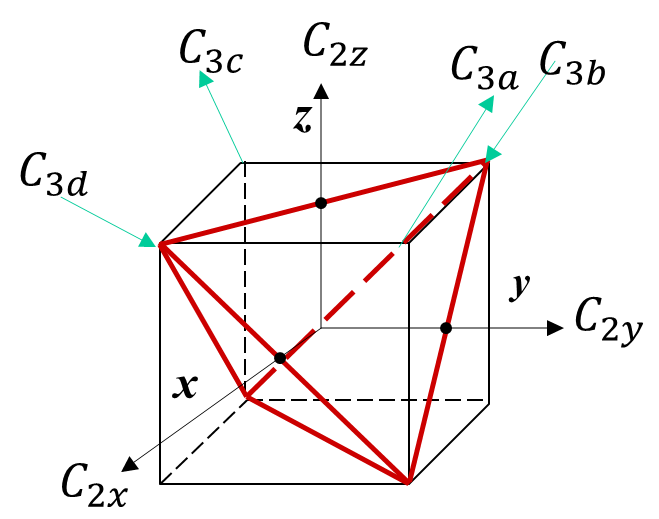
上式中红色群元对应图中红点,绿色群元对应图中绿点,蓝色群元对应图中蓝点,可以看到,虽然转动矩阵的红点满足封闭性,但是表示矩阵的红点相乘后得到的蓝点并不在限制的范围内。
所以只能一个 R 对应两个 D(l),但是双值表示使用起来并不方便。为了回到传统意义下的单值表示,我们不再让一个群元对应两个表示矩阵,而是让群元翻倍,这样就先在数量上实现了一一对应。
如果在 SO(3) 的群元基础上把群元数扩充一倍,并重新定义绕某轴转 2π 角的操作不再是单位元 e 而是一个二阶元 eˉ (即 eˉeˉ=e),且与所有群元对易,那么可以证明这个群和 SU(2) 同构,叫做 SO(3) 的双群,记为 SOD(3)。
这样我们就重新定义了一种乘法,如下图中 c3 和 c34 不再相等,c32 和 c35 也不再相等,也确实实现了群元数量的翻倍。
双群的单位元 e 是绕某轴转 4π 角的操作:cnn=eˉ, cn2n=e,此时群乘定义改变了,失去了封闭性,所以原来 SO(3) 中的所有群元不再构成群。
因为群乘定义改变了,所以 SO(3) 不是 SOD(3) 的子群
现在就可以在 SOD(3) 上的群元和表示矩阵 D(l) 之间建立一一对应关系了,也就是说,引入双群之后,其双值表示替代了了单群的双值表示。
若规定在 SO(3) 的参数范围 α∈[0,2π), β∈[0,π], γ∈[0,2π),则 ±g(α,β,γ) 给出所有 SU(2) 的群元,原 ±g↦R 对应规则变为
g(α,β,γ)−g(α,β,γ)=g(α+2π,β,γ)↦R(α,β,γ)↦eˉR(α,β,γ)=Rˉ(α,β,γ)
从参数空间上看就是 g(DSO(3)) 与 R(DSO(3)) 对应
−g(DSO(3))=g(DSU(2)−DSO(3)) 与 eˉR(DSO(3))=Rˉ(DSO(3)) 对应
我们构造出的 SOD(3) 与 SU(2) 是同构的,因而不论 l 为整数还是半奇数 D(l) 总是 SOD(3) 的单值表示。
若将 α 取值范围扩大到 [0,4π),则 g(α,β,γ) 直接给出所有 SU(2) 群元,与 SOD(3) 群元的对应规则为
α∈[0,2π)α∈[2π,4π)时g(α,β,γ)↦R(α,β,γ)时g(α,β,γ)↦eˉR(α,β,γ)=Rˉ(α,β,γ)
类似的,通过规定转 2π 角的操作不是单位元 e 而是与所有元对易二阶元 eˉ,可以定义双点群、双空间群以及 O(3) 的双群 OD(3)。
自旋空间的旋转
引入双群以后,就可以方便地描述自旋空间中的旋转了。
SU(2) 群元代表自旋空间中的转动
我们说 SU(2) 群与 SO(3) 的对应为
gσg−1=σR(g)g−1σg=σR(g−1)=σR(g)−1
设一自旋态为
∣ξ(u1,u2)⟩=u1∣↑⟩+u2∣↓⟩=(u1u2)=u
则该态在 i 方向上分量的自旋算符 S^=2ℏσ 的期望值为
ξi=⟨ξ2ℏσiξ⟩=2ℏu+σiu
我们可以把平均值写成三个方向上的分量,看作是三维实空间中的矢量,空间旋转对平均值的作用为 ξ→ξ′=Rξ,写成分量形式就是
ξi′=∑jRijξj
ξ1′ξ2′ξ3′=Rξ1ξ2ξ3
计算
ξi′=j∑Rijξj=j∑Rij2ℏu+σju=2ℏu+(j∑σjRjiT)u=2ℏu+(j∑σj(R−1)ji)u=2ℏu+(g−1σig)u=2ℏ(gu)+σi(gu)=2ℏu′+σiu′
得到
ξ′=R(g)ξ⇔u′=gu
也就是说,R 旋转对平均值的作用等价于 g 变换对自旋态的作用。g 即自旋空间的旋转(对 u 的变换)且唯一对应坐标空间的一个旋转 R(g),或者说旋转 R 对自旋空间也是有作用的,只不过是以 g 的形式体现在自旋空间,而且同一个 R 对应 ±g 两个变换。
为了让这种对应变为一一对应的,我们可以把 R 由单群变为双群,即 g↦R,−g↦Rˉ。
设旋转 R(α,β,γ)∈SO(3),则有 R(2π,0,0)=I3。当体系不含自旋或不考虑自旋时,旋转 R(2π,0,0) 所对应的体系的变换算符 P^R 就是单位算符,即不变,或变回原状态。
当体系含有 21 自旋时,旋转 R(2π,0,0) 对应的变换算符 P^R 就不再是单位算符,因旋转不仅对坐标空间有作用,对自旋空间也有作用,而自旋空间中的变换则是相应的 SU(2) 的群元 ±g(2π,0,0)=±I2。那么这时便出现问题,若体系原来的自旋态是 u=(u1u2),那么旋转后的态到底是 I2u 还是 −I2u 呢?虽然二者在可观察量意义下代表同一量子态,但是却反映出体系的不同对称性。为了描述这种不同,必须区分这两个变换,于是引入与 SU(2) 同构的双群 SOD(3) 便成为必要。引入双群后,R 分裂为 R 和 Rˉ 两个旋转,二者对坐标空间的旋转效果一样,但对自旋空间的旋转效果不同。
当要描述体系在坐标空间和自旋空间协同旋转下的对称性时(比如电子的自旋轨道耦合),需使用双群。



与SO(3)的对应-限制范围.png)
双群群元.png)
双群与SU(2)的对应关系.png)